来源: 时间:2022-08-04 08:35:04
麻省理工学院的科学家开发了一种人工智能系统,可以从城市的航空影像中自动追踪道路。为导航应用绘制道路地图可能很乏味。即使在拍摄了航拍图像之后,像Google这样的公司仍然必须花费许多小时来手动追踪道路。结果,全球超过2000万英里的道路中的绝大多数尚未绘制地图。
地图上的差距是一个问题,特别是对于正在为自动驾驶汽车开发的系统而言。为了解决这个问题,研究人员创建了RoadTracer,这是一种自动构建路线图的方法,45% 比现有方法更准确。该团队使用航空图像中的数据表示,RoadTracer不仅比当前的方法更准确,而且更具成本效益。
美国麻省理工学院 (Massachusetts Institute of Technology) 教授穆罕默德·阿里扎德 (Mohammad Alizadeh) 表示: “RoadTracer非常适合绘制世界上地图经常过时的地区的地图,其中既包括人口较少的地方,也包括施工频繁的地区。”“例如,泰国农村等偏远地区的现有地图缺少许多道路。道路示踪剂可以帮助他们更准确,“阿里扎德说。
在查看纽约市航空影像的测试中,RoadTracer可以正确绘制其路口的44%,这是基于图像分割的传统方法的两倍以上,而传统方法只能绘制19%。当前自动化地图的努力涉及训练神经网络以查看航空图像并将inpidual像素识别为 “道路” 或 “不道路”。由于航空图像通常可能是模棱两可和不完整的,因此此类系统还需要一个后处理步骤,旨在试图填补一些空白。
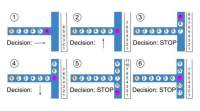
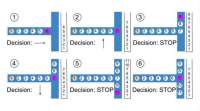
不幸的是,这些所谓的 “分割” 方法通常是不精确的: 如果模型错误地标记了一个像素,则该错误将在最终路线图中被放大。如果航拍图像中的树木,建筑物或阴影掩盖了道路的起点和终点,则尤其可能出现错误。同时,RoadTracer逐步创建地图。它从道路上的已知位置开始,并使用神经网络检查周围区域,以确定哪个点最有可能是道路上的下一部分。然后,它添加了这一点,并重复了该过程,以逐步一步一步地找出道路。
麻省理工学院的研究生Fayven Bastani说: “RoadTracer不是一次就各种像素是否代表道路的各个部分做出数千个不同的决定,而是专注于一个更简单的问题,即从我们知道的特定地点出发时要遵循哪个方向。”巴斯塔尼说: “这实际上在很多方面都更接近我们作为人类如何构建我们周围世界的心理模型。”该团队对RoadTracer进行了北美和欧洲六个国家/地区的25个城市的航空影像培训,然后评估了其在其他15个城市的制图能力。
相关推荐
猜你喜欢